
Fonctionnement du Gyro
Origine du texte :
Helituning.com
BREF HISTORIQUE…
Il y a plusieurs années, les gyroscopes comprenaient un moteur et un dispositif de rotation fonctionnant comme les toupies que l'on fait tourner avec une ficelle très rapidement et qui tiennent toujours debout et verticalement sur leur axe quelque soit l'inclinaison de la surface d'appui.
Il s'agissait de la mécanique de base des gyroscopes mais ce type de gyro a pratiquement disparu de nos jours.
Aujourd'hui nous disposons de gyroscopes performants connus sous le nom de 'gyro à verrouillage de cap' (AVCS – Active Angular Velocity Control System / HH - Heading Lock) sans aucune parties mobiles à l'intérieur mais équipés de capteurs sans frottement pour certains (SMM – Silicon Micro Machine) et de senseurs type MEMS pour d'autres (Micro Electro-Mecanical System).
Certains gyro n'ont pas de mode HL et sont surtout utilisés sur des maquettes. Ils sont relativement bons marchés, fiables et assez performants pour masquer en partie une mauvaise configuration de la partie Ac.
Pour tirer le meilleur parti de son matériel, il est nécessaire de comprendre comment fonctionne un gyro aussi bien en mode HL qu'en mode Normal et comment il peut s'harmoniser au mieux avec le servo d'anti-couple.
On va donc tenter d'expliquer ici les bases qu'il faut savoir sur le fonctionnement du gyro sans rentrer des détails trop pointus ni essayer de comprendre ce qui se passe exactement dans le boîtier. Le but étant de savoir comment obtenir les meilleures performances de son matériel.
• Heading Lock vs Mode Normal
Basiquement, le gyro fonctionne comme un amortisseur opérant autour de l'anti-couple. Quand on donne du pas, le gyro détecte la rotation générée par le rotor et contrôle le servo d'ac pour compenser automatiquement le couple généré et ainsi garder la queue dans son axe.
Le gyro est un intermédiaire entre votre émetteur et l'action de l'anti-couple.
Le mode HL se différencie du mode Normal par le fait qu'il sait dans quelle direction pointe l'anti-couple, en tout temps.
Si l'hélico est en vol stationnaire stable dans un vent de travers, le gyro va tenir l'anti-couple dans la dernière position donnée indépendamment des rafales qu'il peut y avoir.
En mode HL l'anti-couple ne tournera pas tant que vous ne touchez pas le manche d'Ac de votre émetteur.
Le mode Normal verra l'anti-couple tourner lentement dans le sens du vent, le gyro ne sachant pas dans quelle direction pointe l'anti-couple.
Il ne fait dans ce mode que compenser plus ou moins grossièrement les dérives dû aux changements du couple rotor lors de mises de pas ou de ordres au cyclique.
En mode Normal l'anti-couple tournera toujours en pointant le nez du modèle au vent sans que vous ne touchiez le manche d'Ac de votre émetteur.
Comprendre cette différence entre le mode HL et Normal est important pour la suite.
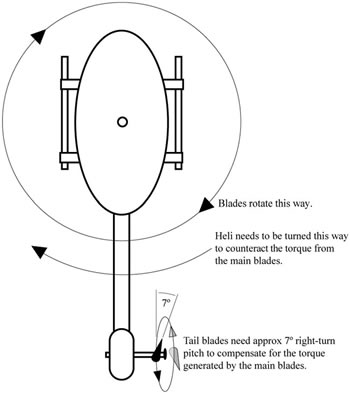
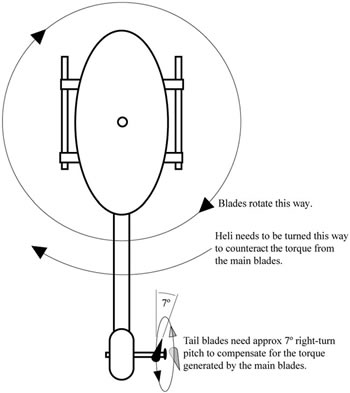
Le couple généré par un hélicoptère dont le rotor tourne en sens horaire est toujours anti-horaire (et inversement), il faut donc quelques degrés d'incidences aux pales d'Ac du côté du couple généré naturellement par le sens de rotation du rotor principal pour le compenser.
Il est important d'ajuster mécaniquement le réglage d'Ac de sorte que l'Ac soit immobile sans toucher son émetteur en mode Normal.
• Pourquoi avoir besoin d'un bon centrage mécanique ?
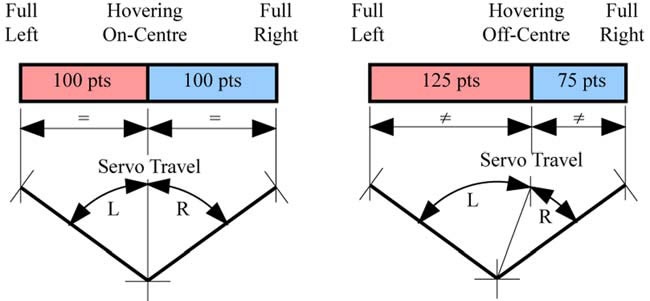
Vous réglez votre neutre avec le slider d'Ac au milieu du débattement possible. Vous aurez donc 100% de débattement à gauche comme à droite. Pour tenir un stationnaire stable, l'Ac doit bouger de 25% par rapport au neutre afin de corriger ce réglage mécanique mal effectué.
En mode Normal, l'hélico partirait en toupie et nécessiterait bcp de trim pour tenir.
En mode HL, le gyroscope va automatiquement le faire pour vous et se contenter de garder l'hélico sur son cap de gré ou de force.
'Chouette, gardons-le en HL et ne réglons rien mécaniquement' dites vous ?
Mais ce n'est pas si simple.
Maintenant que vous avez une erreur de 25% pour garder le cap, vous n'avez plus que 75% de ce même côté, alors que l'autre côté vous donnera 125% de débattement disponible.
Vous aurez donc un réglage déséquilibré.
Ce déséquilibre sera présent quelque soit le mode utilisé, bien que vous ne le sentirez qu'avec le mode Normal. Le mode HL vous donnera l'impression que tout va bien car corrigeant automatiquement ce mauvais réglage qui pourtant est bien présent.
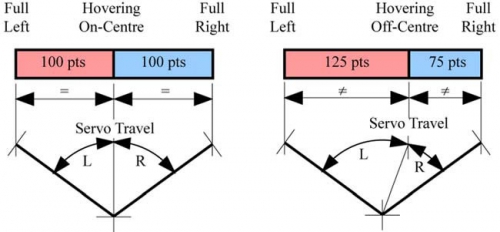
Dans les deux cas illustrés ci-dessus, le débattement du servo est fixe et limité sur des points délimités par le gyro. Il ne peut aller au-delà de ces points.
Lorsqu'il y a un écart entre le neutre du servo et l'emplacement mécanique nécessaire pour le stationnaire, le débattement entre la droite et la gauche est déséquilibré et l'efficacité n'est pas optimum.
Afin de faire travailler son gyro de manière optimale, il est nécessaire de procéder au bon réglage mécanique suivant le processus suivant, en référence à la figure 3 ci-dessous.
1. Régler son Ac selon notice afin de commencer sur un pré-réglage d'origine.
2. Régler le gyroscope en mode Normal et faire un stationnaire (un jour sans vent étant préférable, ou en indoor)
3. Utiliser le Trim pour obtenir un stationnaire stable et un anti-couple ne bougeant pas lorsque vos ne touchez pas à votre émetteur.
Le Trim ajustera le palonnier à l'emplacement mécanique idéal.
4. Poser et arrêter le moteur. Prendre note de la quantité de Trim nécessaire pour maintenir un stationnaire stable.
5. Régler mécaniquement soit la position du servo sur la poutre de queue, soit la longueur de la tringle dans le cas d'un servo intégré au châssis, en remettant votre Trim à zéro.
6. Refaire un stationnaire et répéter le processus jusqu'à ne plus avoir besoin de toucher ni au Trim, ni au manche d'Ac en mode Normal.
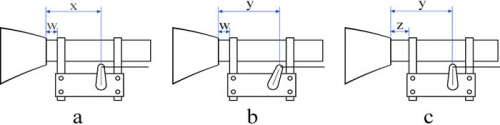
Figure a – Pré-réglage de base
Figure b – Position du palonnier après trim de l'Ac en vol
Figure c – Ajustement de l'emplacement servo après remise à zéro du trim
Si le servo ne se trouve pas sur le tube, il suffit d'ajuster la tringle en vissant ou dévissant les chapes.
Veiller à positionner le palonnier a 90° exactement par rapport à la tringle sans trim ni subtrim. Les cannelures de l'axe du servo sont impaires et permettent de trouver facilement ces 90°, d'autant plus si on utilise un palonnier à plusieurs bras (chaque bras ayant un angle légèrement décalé).
Le neutre optimal est maintenant trouvé. On doit donc pouvoir faire maintenant un stationnaire sans toucher au manche d'Ac, en mode Normal et avec la tringlerie à 90° exactement.
Ceci est la configuration mécanique optimale. Elle permet de faire travailler l'électronique et la mécanique beaucoup plus efficacement autour de leurs positions centrales.
• Fins de course (sur Tx)
Il y a parfois des malentendus sur le réglage des fins de course (Atv)
Les gyroscopes intègrent généralement leurs propres fins de course, limitant les débattements. Des deux côtés en même temps pour certains gyro, ou indépendamment gauche/droite pour les autres (généralement plus chers et plus haut de gamme).
C'est le gyro qui contrôle le débattement du servo et non l'émetteur. Il faut ajuster les limites pour éviter que le servo ne force mécaniquement en fin de course d'un côté comme de l'autre.
L'émetteur a également un menu pour régler les fins de course, à quoi sert-elle donc ?
Ce réglage là affecte la vitesse de rotation, appelé 'taux de pirouette'.
En mode HL, le gyroscope sait toujours où pointe l'Ac et maintiendra cette position le mieux qu'il peut en contrant les forces extérieures agissant sur la machine.
L'Ac ne bougera pas tant que vous n'aurez pas donné l'ordre de le faire.
Contrairement au mode Normal, lorsqu'on donne un ordre au manche Ac, on demande au gyro de faire pivoter l'hélico à un taux donné. Il s'agit de la vitesse de rotation pour faire un tour complet (360°) en une seconde par exemple.
100% de fins de course donnera une vitesse de rotation raisonnable pour les pilotes dégrossis.
Augmenter ou diminuer cette valeur aura une répercussion directe sur cette vitesse, de chaque côté indépendamment.
Le gyro maintiendra cette vitesse de rotation indépendamment des forces extérieures tel que rafales de vent et ajustera en conséquence le servo d'Ac pour y parvenir.
C'est pour cette raison qu'il ne faut jamais mettre de trim sur la voie Ac en mode HL car le gyro l'interprétera comme un ordre donné par l'émetteur pour faire pivoter constamment l'hélico, au contraire du trim possible en mode Normal pour trouver un ajustement mécanique précis lorsque l'on utilise ce mode pour voler.

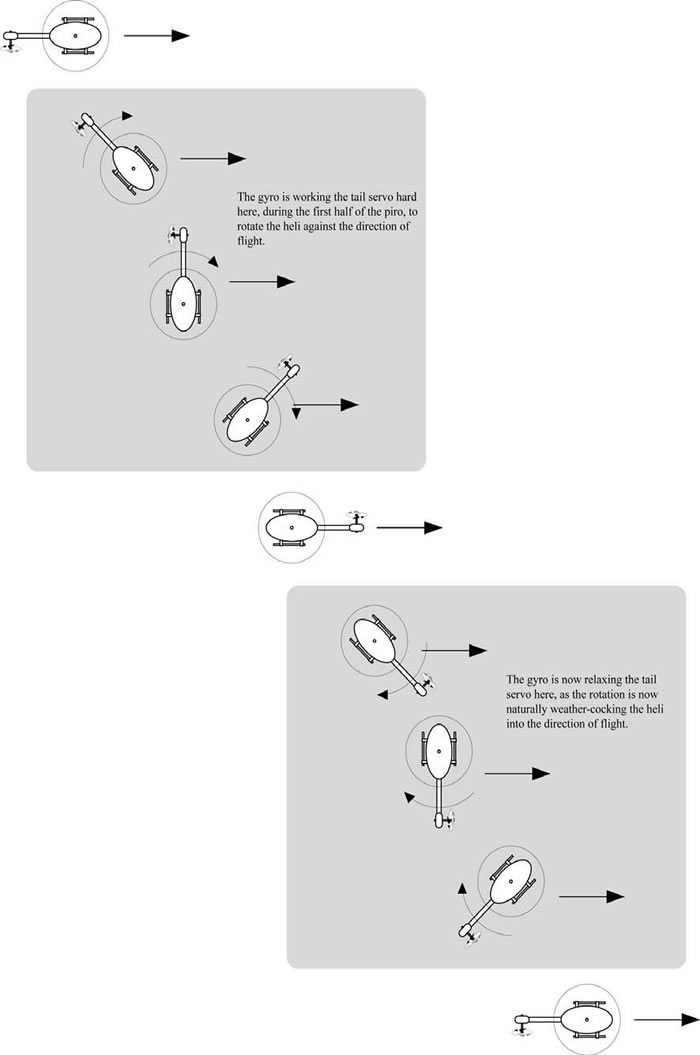
Faire une pirouette en stationnaire un jour de temps calme est facile, il suffit d'actionner le manche et voir son hélico tourner avec un taux constant. Si on essaie de le faire en mode HL pendant qu'on translate rapidement (voir figure ci-dessus), que se passe t'il ?
La 1ère moitié de pirouette (sur 180°) est plus lente que la 2ème moitié car on se trouve face au vent, nécessitant beaucoup plus d'incidence à l'Ac.
Pour tenter de maintenir le taux de rotation, le gyro pousse au maximum le débattement du servo.
Sur la 2ème moité de la pirouette on agit dans le sens du vent, nécessitant très peu d'effort sur l'Ac, le gyro va ramener le bras du servo vers le neutre pour essayer de maintenir un taux de rotation constant en réduisant l'incidence des pales.
En mode HL, c'est le gyro qui travaille pour maintenir cette vitesse de rotation constante.
Vitesse réglée par le biais des fins de course sur l'émetteur.
On comprend à présent plus facilement l'importance du réglage des limites sur le gyro.
Le débattement du servo Ac n'a aucun rapport avec le débattement du manche Ac sur l'émetteur. Le fait que la totalité de la course Ac ne se retrouve que sur un débattement réduit du manche en statique est donc normal.
Le gyro va mettre l'incidence nécessaire pour tourner à la vitesse demandée.
En statique, l'hélico ne pivotant pas, il va, quelque soit la position du manche, amener les pales en butées (limites réglées sur le gyro) et y rester même si le manche est ramené ensuite au neutre.
On ne demande pas au servo de se positionner selon la position du manche Ac, sinon au gyro de tourner selon l'ordre donné, ce qui est totalement différent.
Si l'hélico ne bouge pas, manche au neutre, incidence des pales au maximum, il n'a aucune raison de corriger cette incidence qu'il considérera comme correct pour ne pas pivoter.
Il faut tout de même être prudent sur le taux de pirouette. Sur un hélico de grande taille, en cas de taux trop élevé, si on exécute une pirouette trop rapide et que l'on relâche le manche, l'ordre de stopper cette toupie de façon brutale inflige des efforts très important sur la mécanique interne du servo et peut casser des pignons avec les conséquences que l'on peut devnier.
Ce n'est pas la vitesse de rotation qui cause le plus d'effort sur un servo, mais l'arrêt d'une pirouette qui est le plus contraignant mécaniquement.
• Le gain
Qu'est-ce que le gain sur un gyro ? Dans les deux modes, HL et Normal, le pourcentage de gain correspond à la sensibilité du gyro au changement de position.
Si elle est trop élevée, la queue oscille de droite à gauche de façon rapide à cause de la surcompensation par rapport aux corrections du servo.
Si elle trop faible, la queue oscillera doucement et déviera lors d'appel de pas. Les corrections du servo ne seront pas en mesure de compenser assez rapidement l'Ac lors de rafales ou de l'augmentation du couple provoquée par la mise de pas car pas assez sensible.
La plupart de gyro travaille idéalement autour des 30-50% de gain, mais ce n'est pas nécessairement la valeur que l'on voit sur son émetteur.
On peut souvent augmenter ce gain à 60-70% voir un peu plus. Ce pourcentage se base parfois sur 140 points de débattement. (Sur la plupart des émetteurs, les canaux travaillent sur une résolution de 280 points) (140 points dans les deux directions)
Dans ce cas, 60% de gain réglé sur 140 points équivaut à 42% sur 100 points.
Donc le gyro aura un réglage effectif de 42% et non 60%.
L'exercice est d'autant plus probant sur les gyros comme les Gy601/611, où la valeur réelle de gain est indiquée sur un écran intégré. Cette valeur sera toujours différente par rapport à celle réglée sur l'émetteur.
Quoique qu'il en soit, on débutera avec un gain sur l'émetteur aux environs de 50% en augmentant graduellement de 5% lors des 1ers essais jusqu'à ce que l'Ac commence à osciller de droite à gauche.
On réduit dès lors le gain par pourcentage pour ne plus avoir d'oscillation.
A ce stade, lorsqu'on effectue une mise de pas brutale, le couple généré par le rotor sur la machine doit être contré et l'Ac ne doit pas dériver.
Une oscillation lente en stationnaire ou une dérive lors de mise de pas indique un gain trop faible.
Une oscillation rapide indique un gain trop élevé.
Une oscillation très rapide et peu constante n'a souvent rien à voir avec le gain du gyro mais une indication sur un disfonctionnement mécanique tel qu'un point dur, un axe légèrement voilé ou un roulement hs.
• Réglages fins
Curtis Youngblood recommande de ne pas positionner le neutre à 90° degré exactement afin de mieux encore équilibrer la commande.
Pourquoi ? Le couple du rotor donne une rotation inverse au sens de rotation des pales principales, ce qui nécessite de l'incidence pour maintenir un stationnaire sans rotation. L'Ac devant produire un effort pour contrer ce couple, on peut deviner qu'il devra produire encore plus d'effort pour tourner contre le couple. A l'inverse tourner dans le sens du couple ne demandera que de relâcher cet effort.
Décaler le neutre en positionnant son palonnier à 95° côté châssis (lorsque pousser la tringle fait travailler l'Ac à contre) donnera plus de force au servo dans le sens du couple afin de le contrer plus facilement.
Il s'agit d'un réglage fin et précis fonctionnant particulièrement bien sur les Vibe (JR). Ce réglage doit prendre en compte la conception du modèle car il peut être différent pour d'autres marques.
On ne peut donc pas garantir de quel côté déplacé le palonnier, pouvant être côté châssis ou côté Ac selon modèle.
Bien entendu cela va à l'encontre de ce qui a déjà été dit sur le neutre du servo et du centrage mécanique de l'Ac, mais permet de mieux comprendre les subtilités à prendre en compte pour avoir la meilleure performance opérationnelle concernant la configuration de l'Ac.
• Conclusion
Voilà une tentative d'explication sur le fonctionnement d'un gyroscope, comment le configurer, le régler et en tirer le meilleur parti. Beaucoup d'infos se trouvent sur le Net concernant différents modèles spécifiques, selon leurs façons de définir le meilleur gain possible, expliquant certaines options disponibles sur certains modèles (gain d'accélération de pirouette, gain de freinage de pirouette, vitesse de réponse, délai)
Mais le plus important dans l'optimisation d'une installation de gyro se trouve dans la mécanique, pas dans l'électronique.
Comme on peut le comprendre, une installation mécanique parfaite définit à elle seule un bon comportement de l'hélicoptère. L'électronique est parfaite pour affiner certaines subtilités et suffisante pour voler sans réglage adéquat, mais la précision est fondamentalement mécanique.
• Derniers conseils
Vérifier scrupuleusement l'ensemble de l'Ac, il ne doit pas y avoir de contrainte sur la commande, ni de points durs.
Il est parfois très instructif et utile de tester son Ac manuellement lorsqu'un réglage est fastidieux.
Pour cela déchapper la tringle côté servo et mettre en route l'hélico en tenant la tringle à la main afin de se rendre compte par soi-même de la force à exercer pour bouger la gouverne une fois en mouvement (en ayant bien etendu pris la précaution d'enlever la tête rotor ultérieurement).
Il peut arriver qu'un ensemble très libre à vide se bloque complètement sous charge. Cela se voit assez vite, le réglage du gain devenant fastidieux et flou, l'Ac flottant à droite et à gauche quelque soit le gain. C'est un signe qui ne trompe pas et qui demande d'atterrir immédiatement afin de trouver l'origine du problème et ainsi éviter de brûler son servo Ac avec les conséquences que cela peut amener.
La différence peut être surprenante entre le mode statique, où tout est libre, et sous charge, où tout l'ensemble peut se bloquer complétement.
Vérifier également deux fois le sens de correction du gyo. Une erreur dans le sens de correction du gyro faisant partir en toupie à vitesse élevée l'hélico dès le décollage, le rendant incontrôlable.
Une ASTUCE mnémotechnique facile à retenir pour régler le sens des pales Ac sur l'émetteur (sens du servo) ainsi que sur le gyro (sens de correction) :
Rappel : l'Ac doit contrer le couple du rotor faisant pivoter la queue de l'hélico dans le sens inverse des pales principales.
Placer l'anti-couple face à soi.
Dans le cas d'un rotor tournant en sens horaire, le bord de fuite des pales Ac devra pointer à droite pour tenir un stationnaire stable.
Manche à droite sur l'émetteur, le bord de fuite des pales pointera à droite
- Dans le cas contraire, changer le sens de débattement du servo dans le menu Revers de l'émetteur.
Pivoter soi-même l'Ac avec la main sur la droite, le gyro corrigera en pointant le bord de fuite des pales également à droite.
- Dans le cas contraire, changez le sens de correction sur le gyro lui-même (potar mécanique ou réglage dans programmation)
Conclusion : Le bord de fuite des pales pointera toujours du côté du déplacement, que ce soit celui du manche de l'émetteur ou d'un déplacement demandant correction du gyro.
Tout ceci pris en compte offrira à l'ensemble Ac de bonnes chances de fonctionner parfaitement.
Petit complément sur la position idéale de la chape sur le palonnier du servo :
La position idéale de la chape sur le palonnier du servo doit se trouver sur le trou permettant un débattement maximum de 45° avant butée mécanique côté Ac.
Pourquoi 45° ? Parce que la course d'une tringle est quasi linéaire jusqu'à 45° puis, passé ce point, elle diminue de plus en plus, apportant de l'exponentiel mécanique

Figure ci-dessus : de 0° à 10°, la course en bout de tringle sera de (par exemple) 1cm, mais de 80° à 90° (donc avec le même débattement de servo) cette course n'aura en bout de tringle plus que 0,2cm
Le rapport 'résolution du servo/efficacité mécanique/linéarité de la commande' optimal se trouve donc toujours de 0° à 45°. Que ce soit en hélico ou en avion, sur toute gouverne.
Note : ce débattement est souvent assymétrique lorsque le gyro a été réglé en mode Normal (quand les limites peuvent se régler sur le gyro des 2 côtés séparément), dans ce cas prendre les 45° sur le côté dont le débattement est le plus élevé.
Helituning.com
BREF HISTORIQUE…
Il y a plusieurs années, les gyroscopes comprenaient un moteur et un dispositif de rotation fonctionnant comme les toupies que l'on fait tourner avec une ficelle très rapidement et qui tiennent toujours debout et verticalement sur leur axe quelque soit l'inclinaison de la surface d'appui.
Il s'agissait de la mécanique de base des gyroscopes mais ce type de gyro a pratiquement disparu de nos jours.
Aujourd'hui nous disposons de gyroscopes performants connus sous le nom de 'gyro à verrouillage de cap' (AVCS – Active Angular Velocity Control System / HH - Heading Lock) sans aucune parties mobiles à l'intérieur mais équipés de capteurs sans frottement pour certains (SMM – Silicon Micro Machine) et de senseurs type MEMS pour d'autres (Micro Electro-Mecanical System).
Certains gyro n'ont pas de mode HL et sont surtout utilisés sur des maquettes. Ils sont relativement bons marchés, fiables et assez performants pour masquer en partie une mauvaise configuration de la partie Ac.
Pour tirer le meilleur parti de son matériel, il est nécessaire de comprendre comment fonctionne un gyro aussi bien en mode HL qu'en mode Normal et comment il peut s'harmoniser au mieux avec le servo d'anti-couple.
On va donc tenter d'expliquer ici les bases qu'il faut savoir sur le fonctionnement du gyro sans rentrer des détails trop pointus ni essayer de comprendre ce qui se passe exactement dans le boîtier. Le but étant de savoir comment obtenir les meilleures performances de son matériel.
• Heading Lock vs Mode Normal
Basiquement, le gyro fonctionne comme un amortisseur opérant autour de l'anti-couple. Quand on donne du pas, le gyro détecte la rotation générée par le rotor et contrôle le servo d'ac pour compenser automatiquement le couple généré et ainsi garder la queue dans son axe.
Le gyro est un intermédiaire entre votre émetteur et l'action de l'anti-couple.
Le mode HL se différencie du mode Normal par le fait qu'il sait dans quelle direction pointe l'anti-couple, en tout temps.
Si l'hélico est en vol stationnaire stable dans un vent de travers, le gyro va tenir l'anti-couple dans la dernière position donnée indépendamment des rafales qu'il peut y avoir.
En mode HL l'anti-couple ne tournera pas tant que vous ne touchez pas le manche d'Ac de votre émetteur.
Le mode Normal verra l'anti-couple tourner lentement dans le sens du vent, le gyro ne sachant pas dans quelle direction pointe l'anti-couple.
Il ne fait dans ce mode que compenser plus ou moins grossièrement les dérives dû aux changements du couple rotor lors de mises de pas ou de ordres au cyclique.
En mode Normal l'anti-couple tournera toujours en pointant le nez du modèle au vent sans que vous ne touchiez le manche d'Ac de votre émetteur.
Comprendre cette différence entre le mode HL et Normal est important pour la suite.
Le couple généré par un hélicoptère dont le rotor tourne en sens horaire est toujours anti-horaire (et inversement), il faut donc quelques degrés d'incidences aux pales d'Ac du côté du couple généré naturellement par le sens de rotation du rotor principal pour le compenser.
Il est important d'ajuster mécaniquement le réglage d'Ac de sorte que l'Ac soit immobile sans toucher son émetteur en mode Normal.
• Pourquoi avoir besoin d'un bon centrage mécanique ?
Vous réglez votre neutre avec le slider d'Ac au milieu du débattement possible. Vous aurez donc 100% de débattement à gauche comme à droite. Pour tenir un stationnaire stable, l'Ac doit bouger de 25% par rapport au neutre afin de corriger ce réglage mécanique mal effectué.
En mode Normal, l'hélico partirait en toupie et nécessiterait bcp de trim pour tenir.
En mode HL, le gyroscope va automatiquement le faire pour vous et se contenter de garder l'hélico sur son cap de gré ou de force.
'Chouette, gardons-le en HL et ne réglons rien mécaniquement' dites vous ?
Mais ce n'est pas si simple.
Maintenant que vous avez une erreur de 25% pour garder le cap, vous n'avez plus que 75% de ce même côté, alors que l'autre côté vous donnera 125% de débattement disponible.
Vous aurez donc un réglage déséquilibré.
Ce déséquilibre sera présent quelque soit le mode utilisé, bien que vous ne le sentirez qu'avec le mode Normal. Le mode HL vous donnera l'impression que tout va bien car corrigeant automatiquement ce mauvais réglage qui pourtant est bien présent.
Dans les deux cas illustrés ci-dessus, le débattement du servo est fixe et limité sur des points délimités par le gyro. Il ne peut aller au-delà de ces points.
Lorsqu'il y a un écart entre le neutre du servo et l'emplacement mécanique nécessaire pour le stationnaire, le débattement entre la droite et la gauche est déséquilibré et l'efficacité n'est pas optimum.
Afin de faire travailler son gyro de manière optimale, il est nécessaire de procéder au bon réglage mécanique suivant le processus suivant, en référence à la figure 3 ci-dessous.
1. Régler son Ac selon notice afin de commencer sur un pré-réglage d'origine.
2. Régler le gyroscope en mode Normal et faire un stationnaire (un jour sans vent étant préférable, ou en indoor)
3. Utiliser le Trim pour obtenir un stationnaire stable et un anti-couple ne bougeant pas lorsque vos ne touchez pas à votre émetteur.
Le Trim ajustera le palonnier à l'emplacement mécanique idéal.
4. Poser et arrêter le moteur. Prendre note de la quantité de Trim nécessaire pour maintenir un stationnaire stable.
5. Régler mécaniquement soit la position du servo sur la poutre de queue, soit la longueur de la tringle dans le cas d'un servo intégré au châssis, en remettant votre Trim à zéro.
6. Refaire un stationnaire et répéter le processus jusqu'à ne plus avoir besoin de toucher ni au Trim, ni au manche d'Ac en mode Normal.
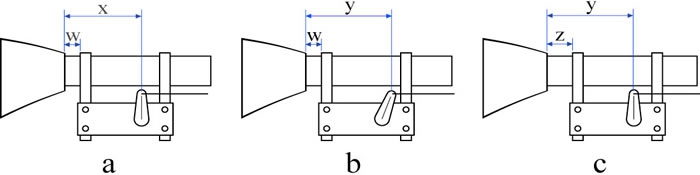
Figure a – Pré-réglage de base
Figure b – Position du palonnier après trim de l'Ac en vol
Figure c – Ajustement de l'emplacement servo après remise à zéro du trim
Si le servo ne se trouve pas sur le tube, il suffit d'ajuster la tringle en vissant ou dévissant les chapes.
Veiller à positionner le palonnier a 90° exactement par rapport à la tringle sans trim ni subtrim. Les cannelures de l'axe du servo sont impaires et permettent de trouver facilement ces 90°, d'autant plus si on utilise un palonnier à plusieurs bras (chaque bras ayant un angle légèrement décalé).
Le neutre optimal est maintenant trouvé. On doit donc pouvoir faire maintenant un stationnaire sans toucher au manche d'Ac, en mode Normal et avec la tringlerie à 90° exactement.
Ceci est la configuration mécanique optimale. Elle permet de faire travailler l'électronique et la mécanique beaucoup plus efficacement autour de leurs positions centrales.
• Fins de course (sur Tx)
Il y a parfois des malentendus sur le réglage des fins de course (Atv)
Les gyroscopes intègrent généralement leurs propres fins de course, limitant les débattements. Des deux côtés en même temps pour certains gyro, ou indépendamment gauche/droite pour les autres (généralement plus chers et plus haut de gamme).
C'est le gyro qui contrôle le débattement du servo et non l'émetteur. Il faut ajuster les limites pour éviter que le servo ne force mécaniquement en fin de course d'un côté comme de l'autre.
L'émetteur a également un menu pour régler les fins de course, à quoi sert-elle donc ?
Ce réglage là affecte la vitesse de rotation, appelé 'taux de pirouette'.
En mode HL, le gyroscope sait toujours où pointe l'Ac et maintiendra cette position le mieux qu'il peut en contrant les forces extérieures agissant sur la machine.
L'Ac ne bougera pas tant que vous n'aurez pas donné l'ordre de le faire.
Contrairement au mode Normal, lorsqu'on donne un ordre au manche Ac, on demande au gyro de faire pivoter l'hélico à un taux donné. Il s'agit de la vitesse de rotation pour faire un tour complet (360°) en une seconde par exemple.
100% de fins de course donnera une vitesse de rotation raisonnable pour les pilotes dégrossis.
Augmenter ou diminuer cette valeur aura une répercussion directe sur cette vitesse, de chaque côté indépendamment.
Le gyro maintiendra cette vitesse de rotation indépendamment des forces extérieures tel que rafales de vent et ajustera en conséquence le servo d'Ac pour y parvenir.
C'est pour cette raison qu'il ne faut jamais mettre de trim sur la voie Ac en mode HL car le gyro l'interprétera comme un ordre donné par l'émetteur pour faire pivoter constamment l'hélico, au contraire du trim possible en mode Normal pour trouver un ajustement mécanique précis lorsque l'on utilise ce mode pour voler.
Faire une pirouette en stationnaire un jour de temps calme est facile, il suffit d'actionner le manche et voir son hélico tourner avec un taux constant. Si on essaie de le faire en mode HL pendant qu'on translate rapidement (voir figure ci-dessus), que se passe t'il ?
La 1ère moitié de pirouette (sur 180°) est plus lente que la 2ème moitié car on se trouve face au vent, nécessitant beaucoup plus d'incidence à l'Ac.
Pour tenter de maintenir le taux de rotation, le gyro pousse au maximum le débattement du servo.
Sur la 2ème moité de la pirouette on agit dans le sens du vent, nécessitant très peu d'effort sur l'Ac, le gyro va ramener le bras du servo vers le neutre pour essayer de maintenir un taux de rotation constant en réduisant l'incidence des pales.
En mode HL, c'est le gyro qui travaille pour maintenir cette vitesse de rotation constante.
Vitesse réglée par le biais des fins de course sur l'émetteur.
On comprend à présent plus facilement l'importance du réglage des limites sur le gyro.
Le débattement du servo Ac n'a aucun rapport avec le débattement du manche Ac sur l'émetteur. Le fait que la totalité de la course Ac ne se retrouve que sur un débattement réduit du manche en statique est donc normal.
Le gyro va mettre l'incidence nécessaire pour tourner à la vitesse demandée.
En statique, l'hélico ne pivotant pas, il va, quelque soit la position du manche, amener les pales en butées (limites réglées sur le gyro) et y rester même si le manche est ramené ensuite au neutre.
On ne demande pas au servo de se positionner selon la position du manche Ac, sinon au gyro de tourner selon l'ordre donné, ce qui est totalement différent.
Si l'hélico ne bouge pas, manche au neutre, incidence des pales au maximum, il n'a aucune raison de corriger cette incidence qu'il considérera comme correct pour ne pas pivoter.
Il faut tout de même être prudent sur le taux de pirouette. Sur un hélico de grande taille, en cas de taux trop élevé, si on exécute une pirouette trop rapide et que l'on relâche le manche, l'ordre de stopper cette toupie de façon brutale inflige des efforts très important sur la mécanique interne du servo et peut casser des pignons avec les conséquences que l'on peut devnier.
Ce n'est pas la vitesse de rotation qui cause le plus d'effort sur un servo, mais l'arrêt d'une pirouette qui est le plus contraignant mécaniquement.
• Le gain
Qu'est-ce que le gain sur un gyro ? Dans les deux modes, HL et Normal, le pourcentage de gain correspond à la sensibilité du gyro au changement de position.
Si elle est trop élevée, la queue oscille de droite à gauche de façon rapide à cause de la surcompensation par rapport aux corrections du servo.
Si elle trop faible, la queue oscillera doucement et déviera lors d'appel de pas. Les corrections du servo ne seront pas en mesure de compenser assez rapidement l'Ac lors de rafales ou de l'augmentation du couple provoquée par la mise de pas car pas assez sensible.
La plupart de gyro travaille idéalement autour des 30-50% de gain, mais ce n'est pas nécessairement la valeur que l'on voit sur son émetteur.
On peut souvent augmenter ce gain à 60-70% voir un peu plus. Ce pourcentage se base parfois sur 140 points de débattement. (Sur la plupart des émetteurs, les canaux travaillent sur une résolution de 280 points) (140 points dans les deux directions)
Dans ce cas, 60% de gain réglé sur 140 points équivaut à 42% sur 100 points.
Donc le gyro aura un réglage effectif de 42% et non 60%.
L'exercice est d'autant plus probant sur les gyros comme les Gy601/611, où la valeur réelle de gain est indiquée sur un écran intégré. Cette valeur sera toujours différente par rapport à celle réglée sur l'émetteur.
Quoique qu'il en soit, on débutera avec un gain sur l'émetteur aux environs de 50% en augmentant graduellement de 5% lors des 1ers essais jusqu'à ce que l'Ac commence à osciller de droite à gauche.
On réduit dès lors le gain par pourcentage pour ne plus avoir d'oscillation.
A ce stade, lorsqu'on effectue une mise de pas brutale, le couple généré par le rotor sur la machine doit être contré et l'Ac ne doit pas dériver.
Une oscillation lente en stationnaire ou une dérive lors de mise de pas indique un gain trop faible.
Une oscillation rapide indique un gain trop élevé.
Une oscillation très rapide et peu constante n'a souvent rien à voir avec le gain du gyro mais une indication sur un disfonctionnement mécanique tel qu'un point dur, un axe légèrement voilé ou un roulement hs.
• Réglages fins
Curtis Youngblood recommande de ne pas positionner le neutre à 90° degré exactement afin de mieux encore équilibrer la commande.
Pourquoi ? Le couple du rotor donne une rotation inverse au sens de rotation des pales principales, ce qui nécessite de l'incidence pour maintenir un stationnaire sans rotation. L'Ac devant produire un effort pour contrer ce couple, on peut deviner qu'il devra produire encore plus d'effort pour tourner contre le couple. A l'inverse tourner dans le sens du couple ne demandera que de relâcher cet effort.
Décaler le neutre en positionnant son palonnier à 95° côté châssis (lorsque pousser la tringle fait travailler l'Ac à contre) donnera plus de force au servo dans le sens du couple afin de le contrer plus facilement.
Il s'agit d'un réglage fin et précis fonctionnant particulièrement bien sur les Vibe (JR). Ce réglage doit prendre en compte la conception du modèle car il peut être différent pour d'autres marques.
On ne peut donc pas garantir de quel côté déplacé le palonnier, pouvant être côté châssis ou côté Ac selon modèle.
Bien entendu cela va à l'encontre de ce qui a déjà été dit sur le neutre du servo et du centrage mécanique de l'Ac, mais permet de mieux comprendre les subtilités à prendre en compte pour avoir la meilleure performance opérationnelle concernant la configuration de l'Ac.
• Conclusion
Voilà une tentative d'explication sur le fonctionnement d'un gyroscope, comment le configurer, le régler et en tirer le meilleur parti. Beaucoup d'infos se trouvent sur le Net concernant différents modèles spécifiques, selon leurs façons de définir le meilleur gain possible, expliquant certaines options disponibles sur certains modèles (gain d'accélération de pirouette, gain de freinage de pirouette, vitesse de réponse, délai)
Mais le plus important dans l'optimisation d'une installation de gyro se trouve dans la mécanique, pas dans l'électronique.
Comme on peut le comprendre, une installation mécanique parfaite définit à elle seule un bon comportement de l'hélicoptère. L'électronique est parfaite pour affiner certaines subtilités et suffisante pour voler sans réglage adéquat, mais la précision est fondamentalement mécanique.
• Derniers conseils
Vérifier scrupuleusement l'ensemble de l'Ac, il ne doit pas y avoir de contrainte sur la commande, ni de points durs.
Il est parfois très instructif et utile de tester son Ac manuellement lorsqu'un réglage est fastidieux.
Pour cela déchapper la tringle côté servo et mettre en route l'hélico en tenant la tringle à la main afin de se rendre compte par soi-même de la force à exercer pour bouger la gouverne une fois en mouvement (en ayant bien etendu pris la précaution d'enlever la tête rotor ultérieurement).
Il peut arriver qu'un ensemble très libre à vide se bloque complètement sous charge. Cela se voit assez vite, le réglage du gain devenant fastidieux et flou, l'Ac flottant à droite et à gauche quelque soit le gain. C'est un signe qui ne trompe pas et qui demande d'atterrir immédiatement afin de trouver l'origine du problème et ainsi éviter de brûler son servo Ac avec les conséquences que cela peut amener.
La différence peut être surprenante entre le mode statique, où tout est libre, et sous charge, où tout l'ensemble peut se bloquer complétement.
Vérifier également deux fois le sens de correction du gyo. Une erreur dans le sens de correction du gyro faisant partir en toupie à vitesse élevée l'hélico dès le décollage, le rendant incontrôlable.
Une ASTUCE mnémotechnique facile à retenir pour régler le sens des pales Ac sur l'émetteur (sens du servo) ainsi que sur le gyro (sens de correction) :
Rappel : l'Ac doit contrer le couple du rotor faisant pivoter la queue de l'hélico dans le sens inverse des pales principales.
Placer l'anti-couple face à soi.
Dans le cas d'un rotor tournant en sens horaire, le bord de fuite des pales Ac devra pointer à droite pour tenir un stationnaire stable.
Manche à droite sur l'émetteur, le bord de fuite des pales pointera à droite
- Dans le cas contraire, changer le sens de débattement du servo dans le menu Revers de l'émetteur.
Pivoter soi-même l'Ac avec la main sur la droite, le gyro corrigera en pointant le bord de fuite des pales également à droite.
- Dans le cas contraire, changez le sens de correction sur le gyro lui-même (potar mécanique ou réglage dans programmation)
Conclusion : Le bord de fuite des pales pointera toujours du côté du déplacement, que ce soit celui du manche de l'émetteur ou d'un déplacement demandant correction du gyro.
Tout ceci pris en compte offrira à l'ensemble Ac de bonnes chances de fonctionner parfaitement.
Petit complément sur la position idéale de la chape sur le palonnier du servo :
La position idéale de la chape sur le palonnier du servo doit se trouver sur le trou permettant un débattement maximum de 45° avant butée mécanique côté Ac.
Pourquoi 45° ? Parce que la course d'une tringle est quasi linéaire jusqu'à 45° puis, passé ce point, elle diminue de plus en plus, apportant de l'exponentiel mécanique
Figure ci-dessus : de 0° à 10°, la course en bout de tringle sera de (par exemple) 1cm, mais de 80° à 90° (donc avec le même débattement de servo) cette course n'aura en bout de tringle plus que 0,2cm
Le rapport 'résolution du servo/efficacité mécanique/linéarité de la commande' optimal se trouve donc toujours de 0° à 45°. Que ce soit en hélico ou en avion, sur toute gouverne.
Note : ce débattement est souvent assymétrique lorsque le gyro a été réglé en mode Normal (quand les limites peuvent se régler sur le gyro des 2 côtés séparément), dans ce cas prendre les 45° sur le côté dont le débattement est le plus élevé.
Retour aux articles de la catégorie - Infos - Techniques (Helico) -
⨯
Inscrivez-vous au blog
Soyez prévenu par email des prochaines mises à jour
Rejoignez les 4 autres membres